Finally after four days of attempts I detected the ISEE-3 / ICE space probe 🙂
I used the LHCP channel that is at 2217.5MHz becuse I have a lot of noise in the RHCP channel. I used a can feddhorn and a plexiglas depolarizer.
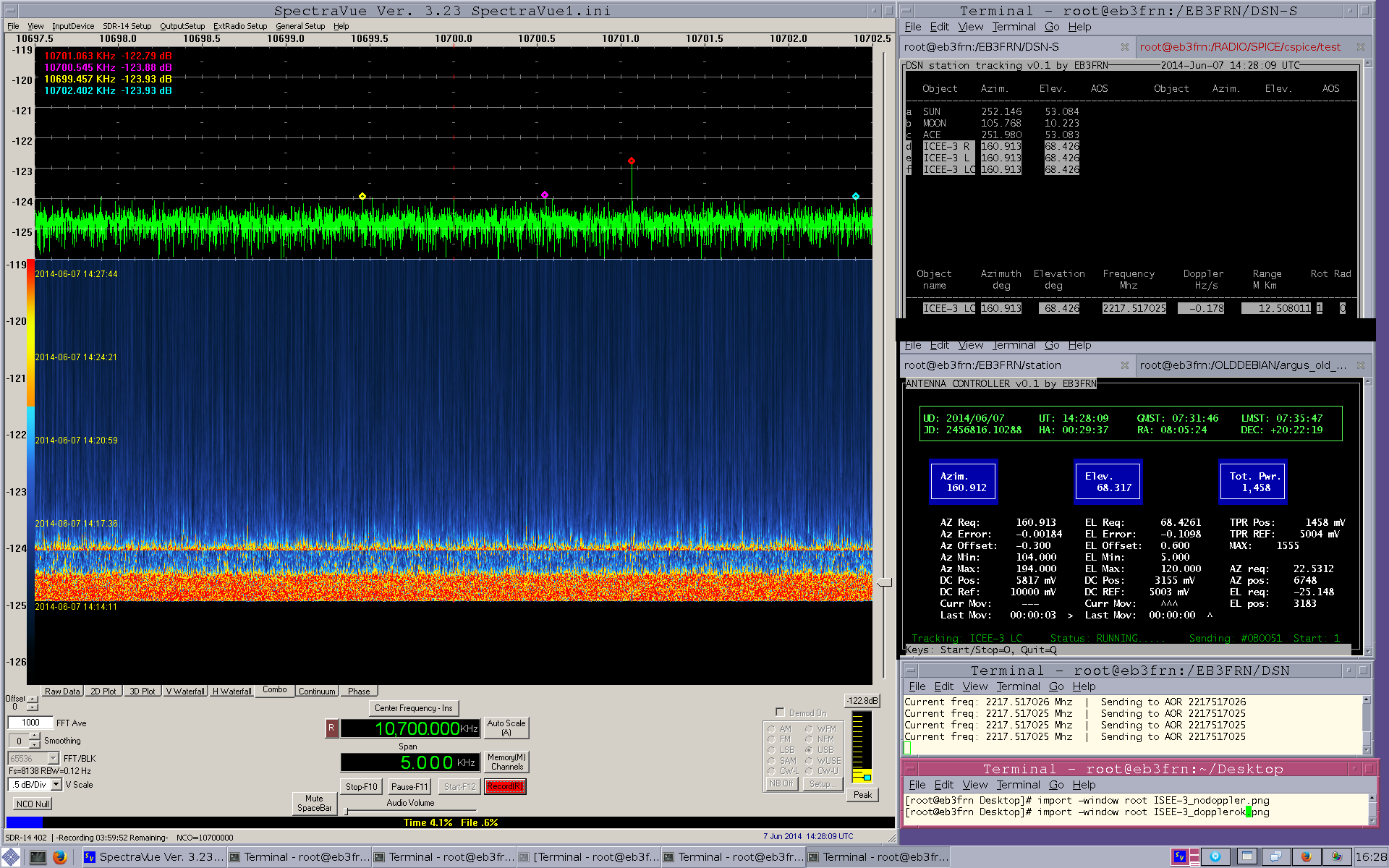
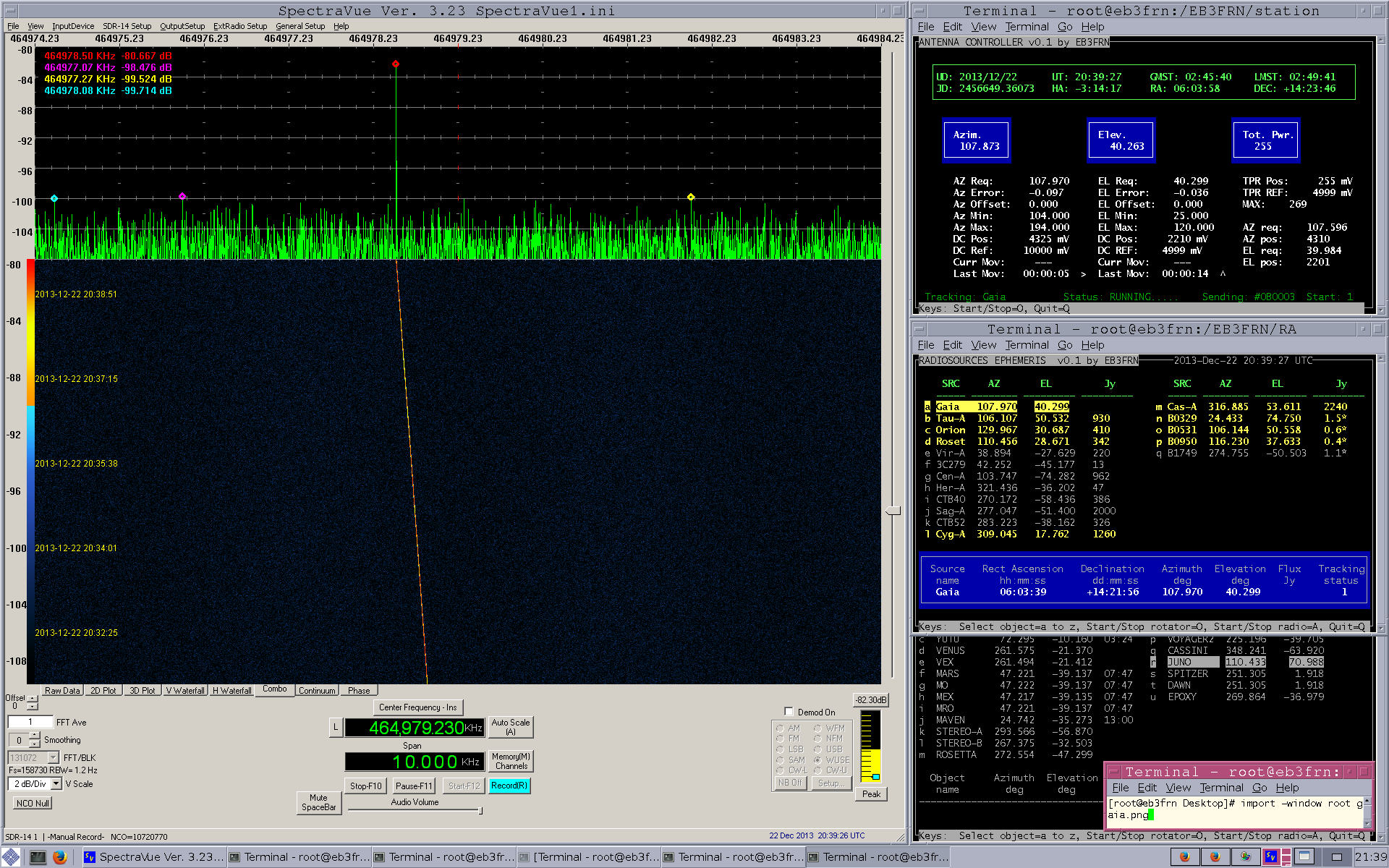
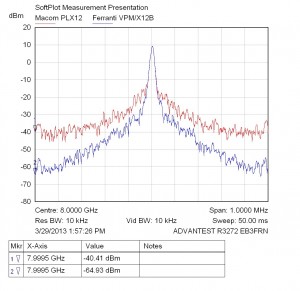
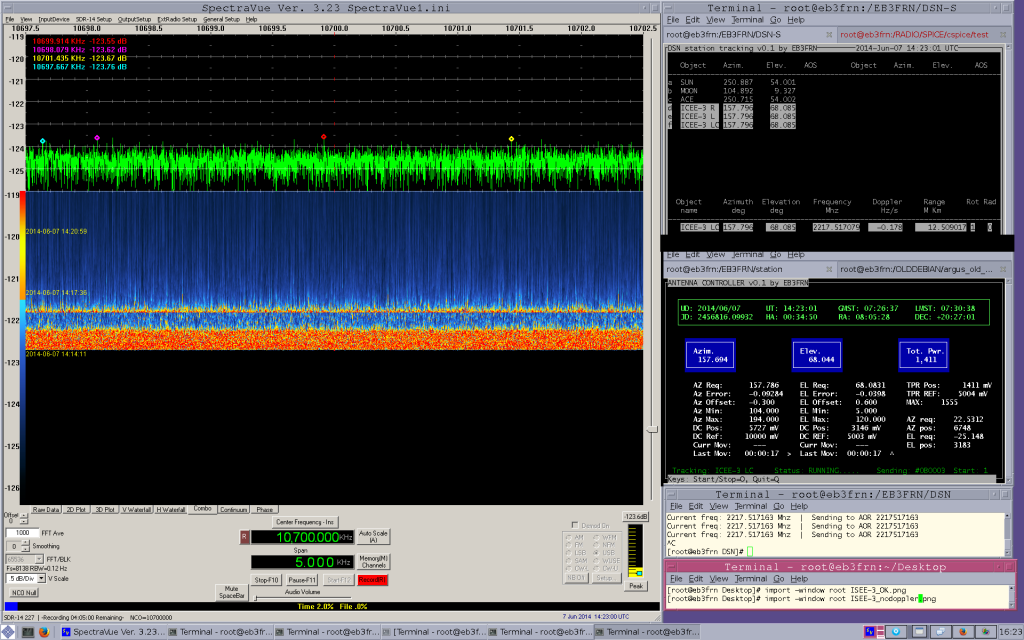
The signal is very weak and impossible to see without time integration. The offset reported by the Arecibo guys of 7202Hz has been very important to locate the probe. In my case I’m getting the probe with a carrier offset of 6035Hz from 2217.5MHz.
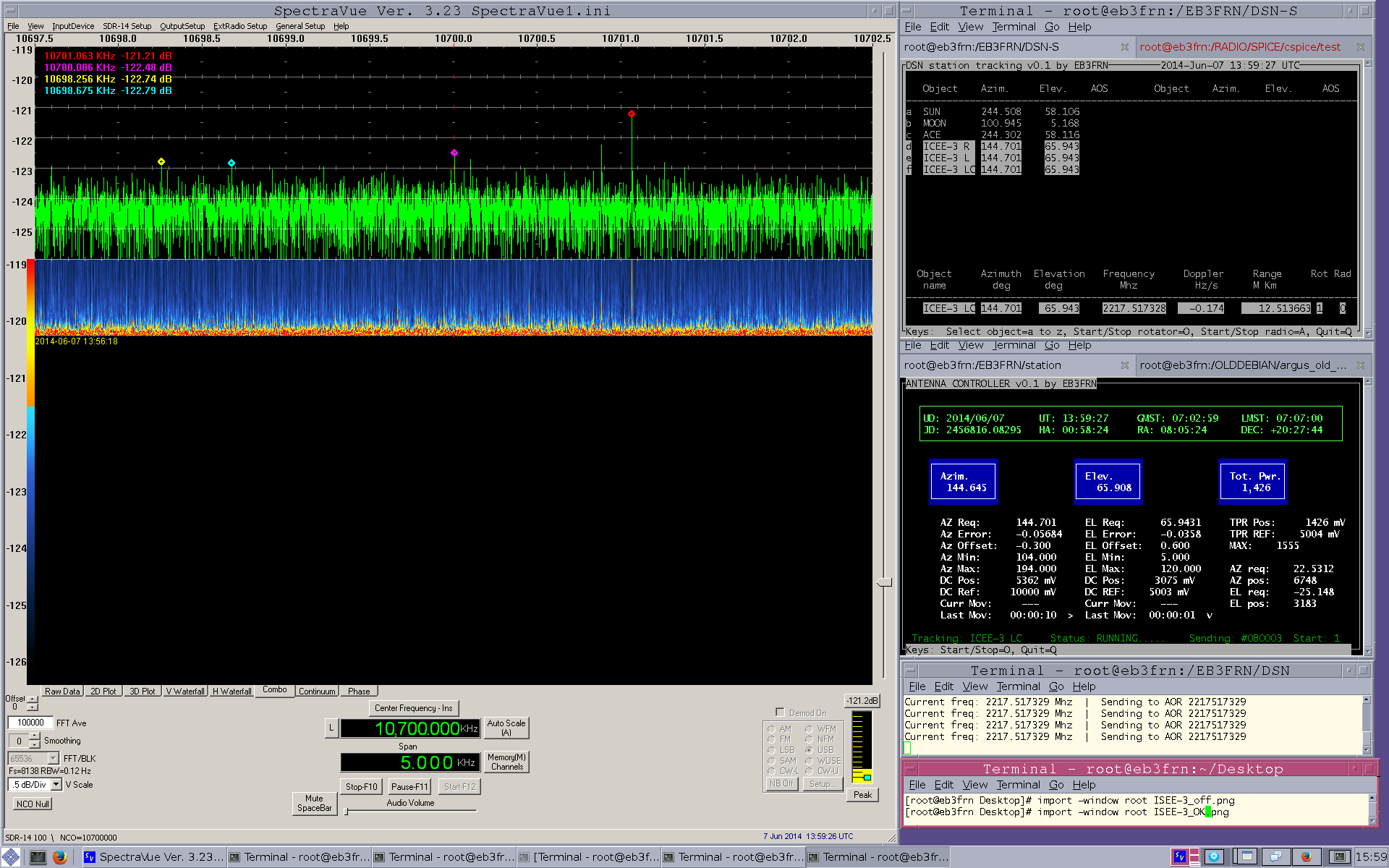
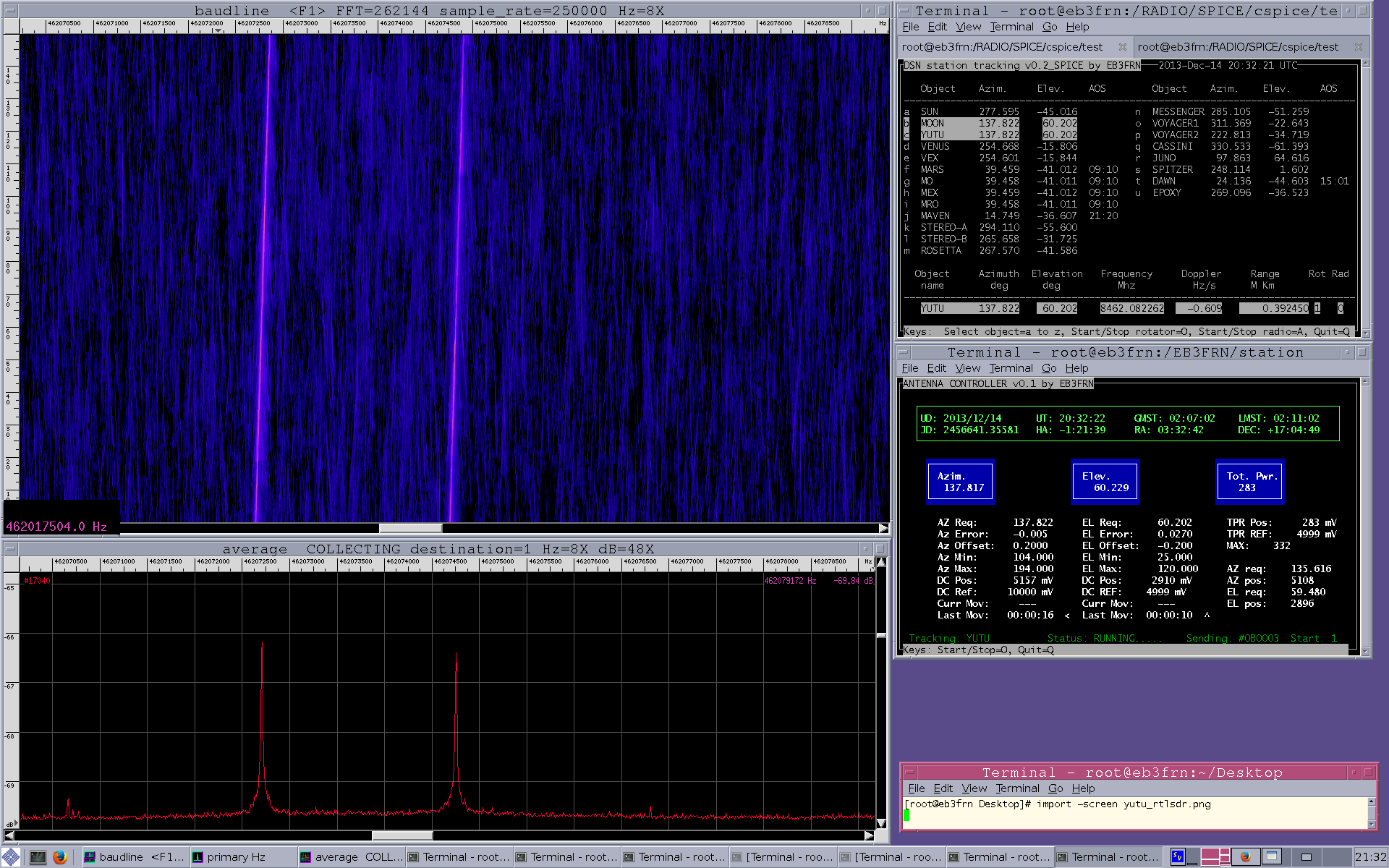
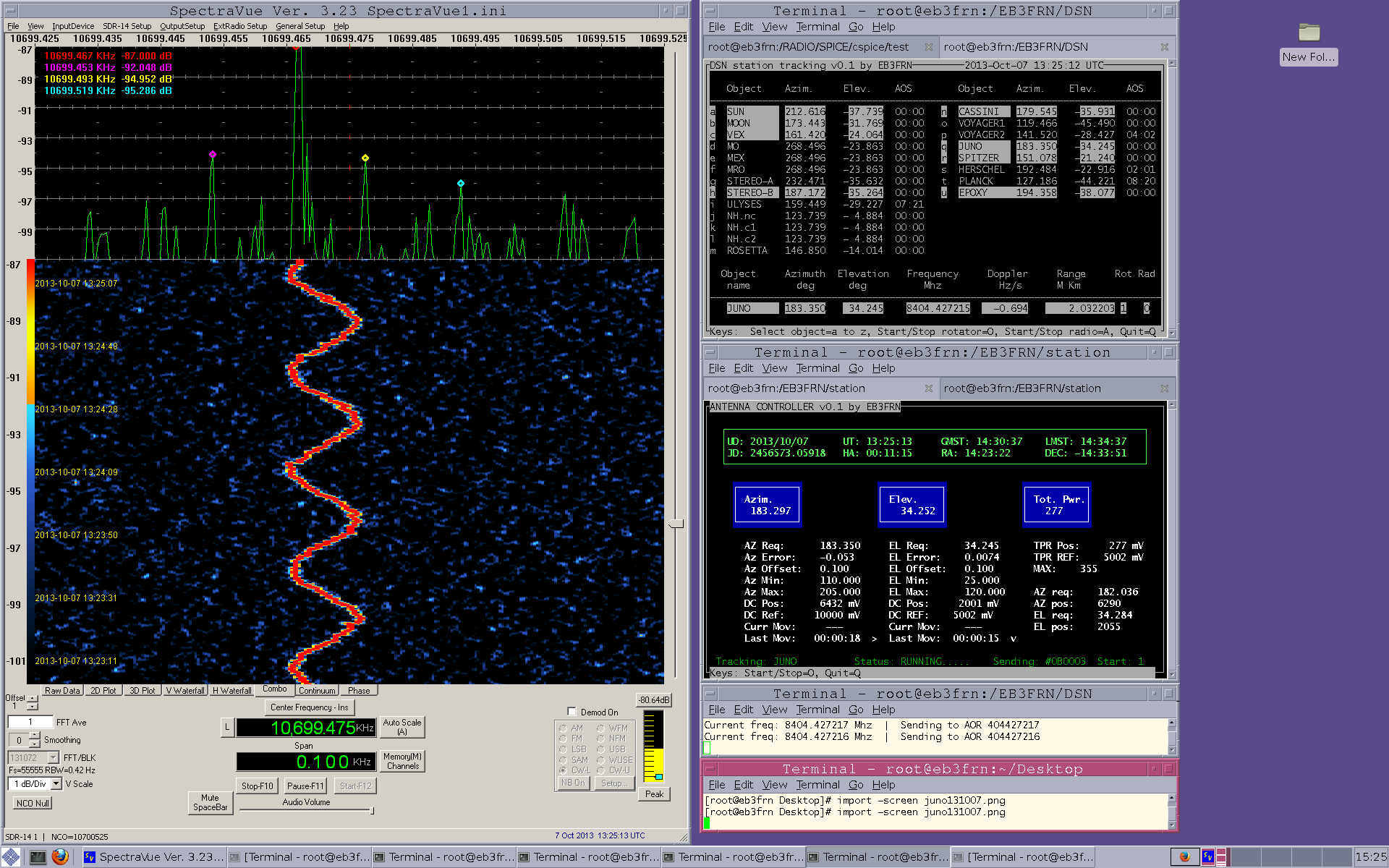
Here the first detection:
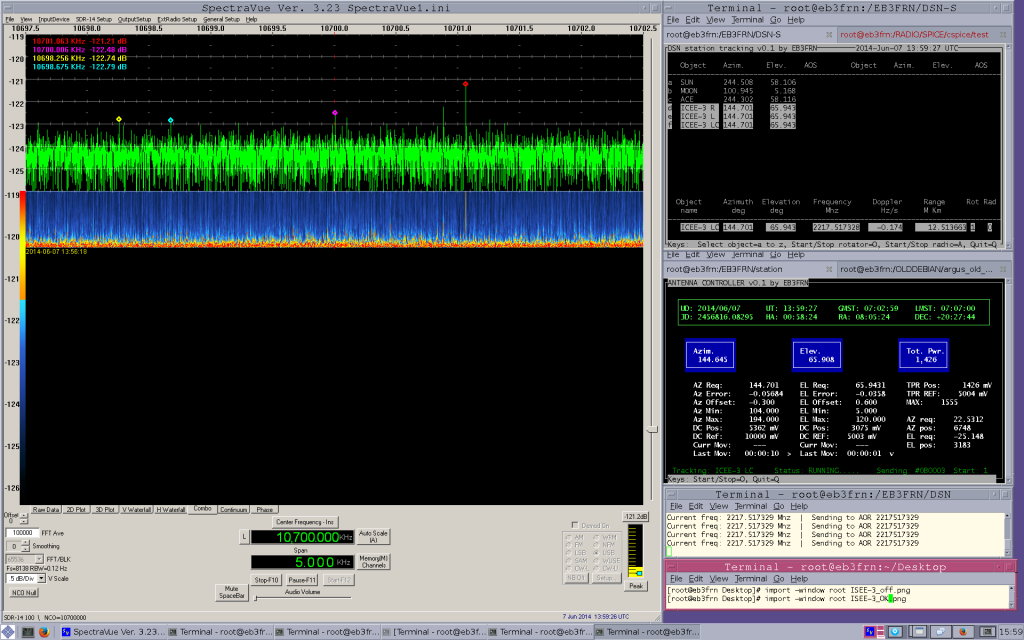
ISEE-3 / ICE Dection
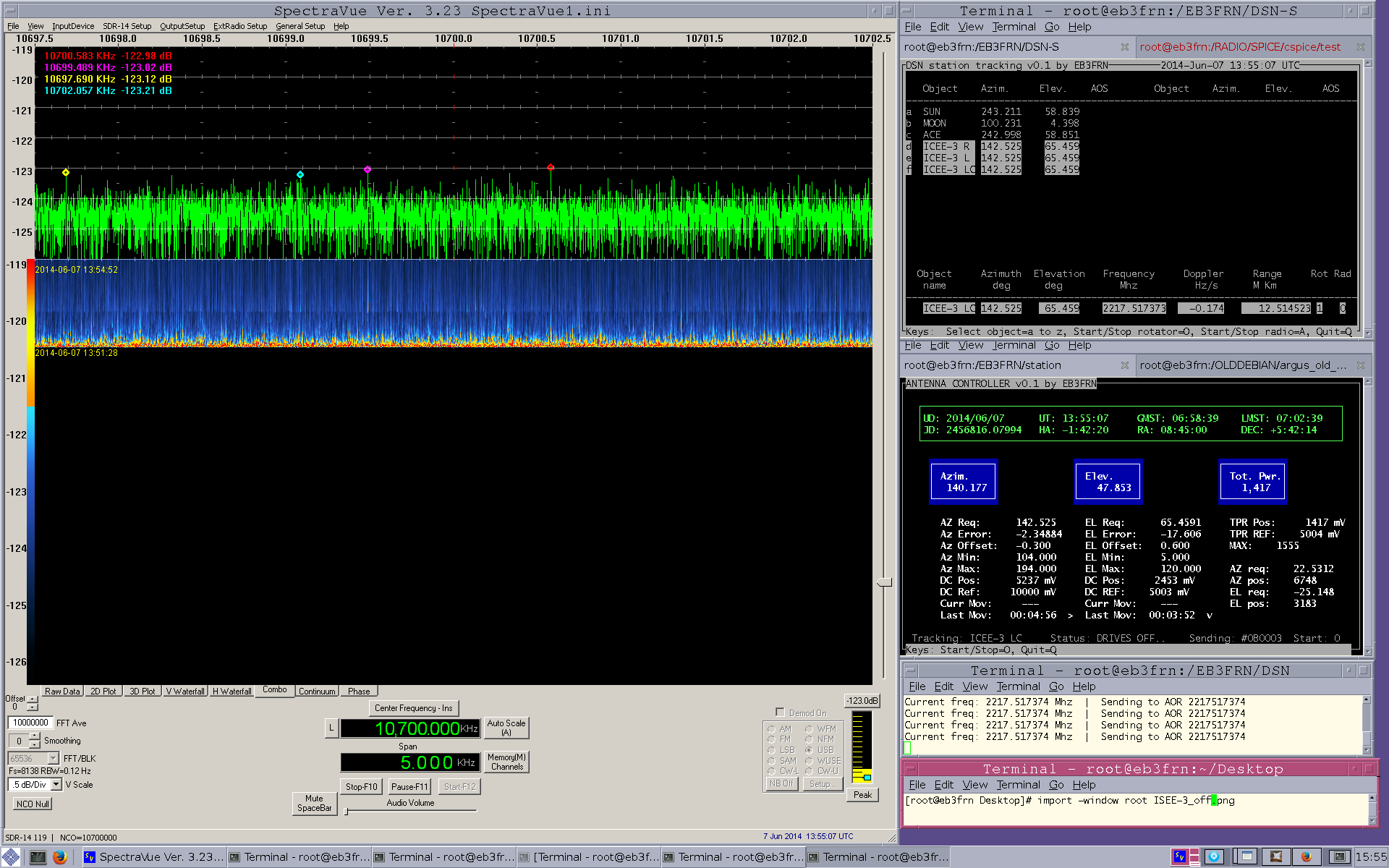
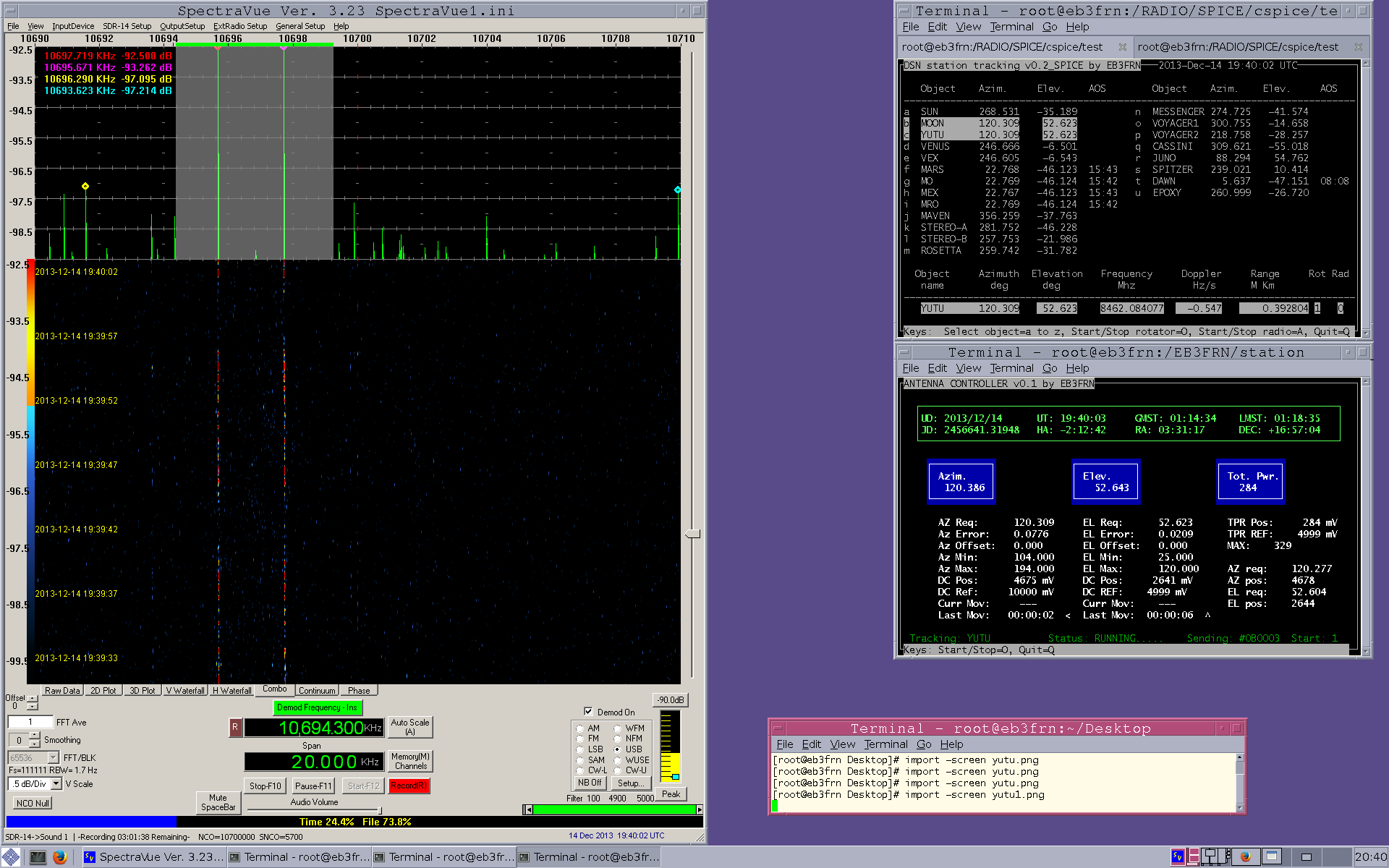
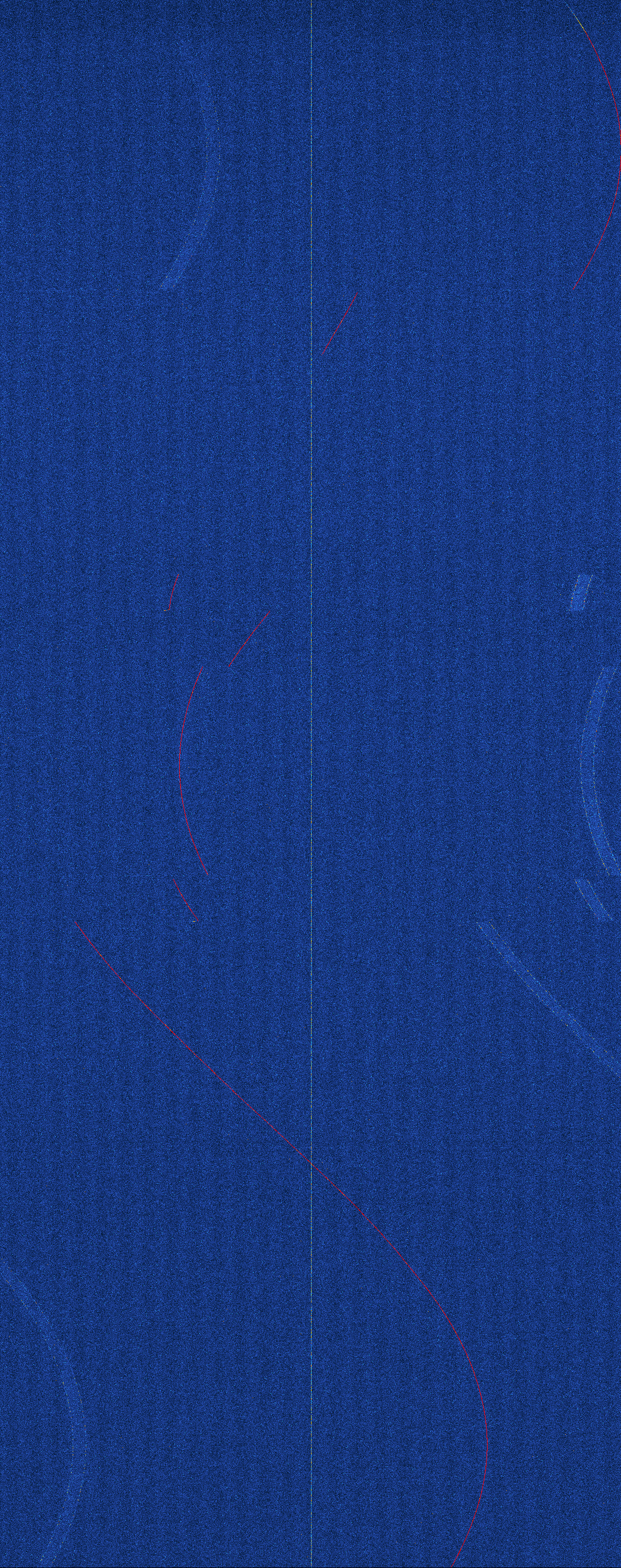
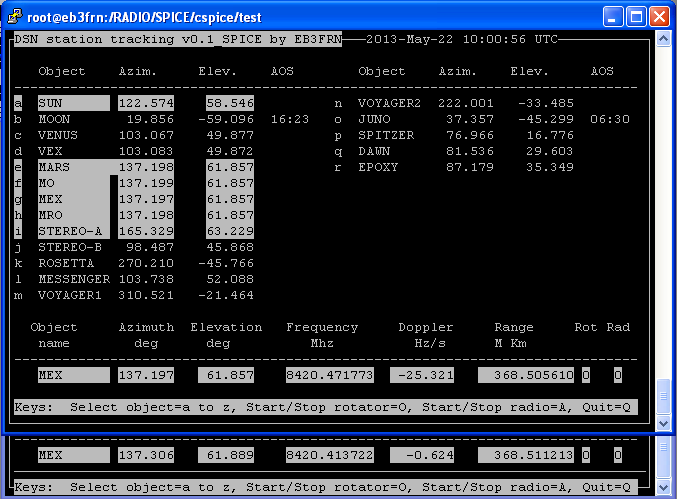
After the detction, to confirm that I moved the dish 18deg, and the signal disappears:
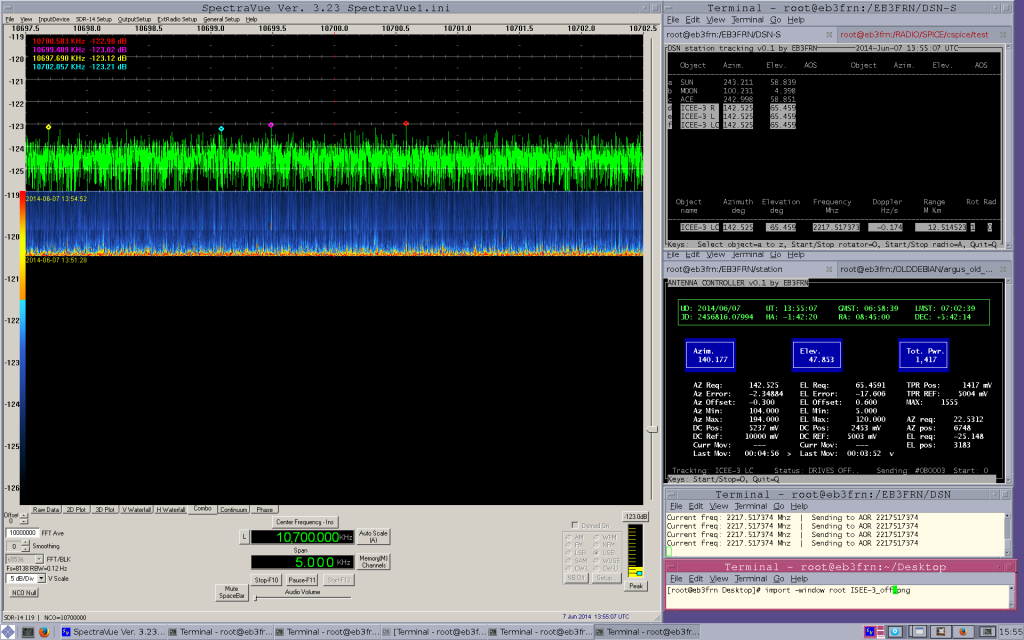
ISEE-3 / ICE off center
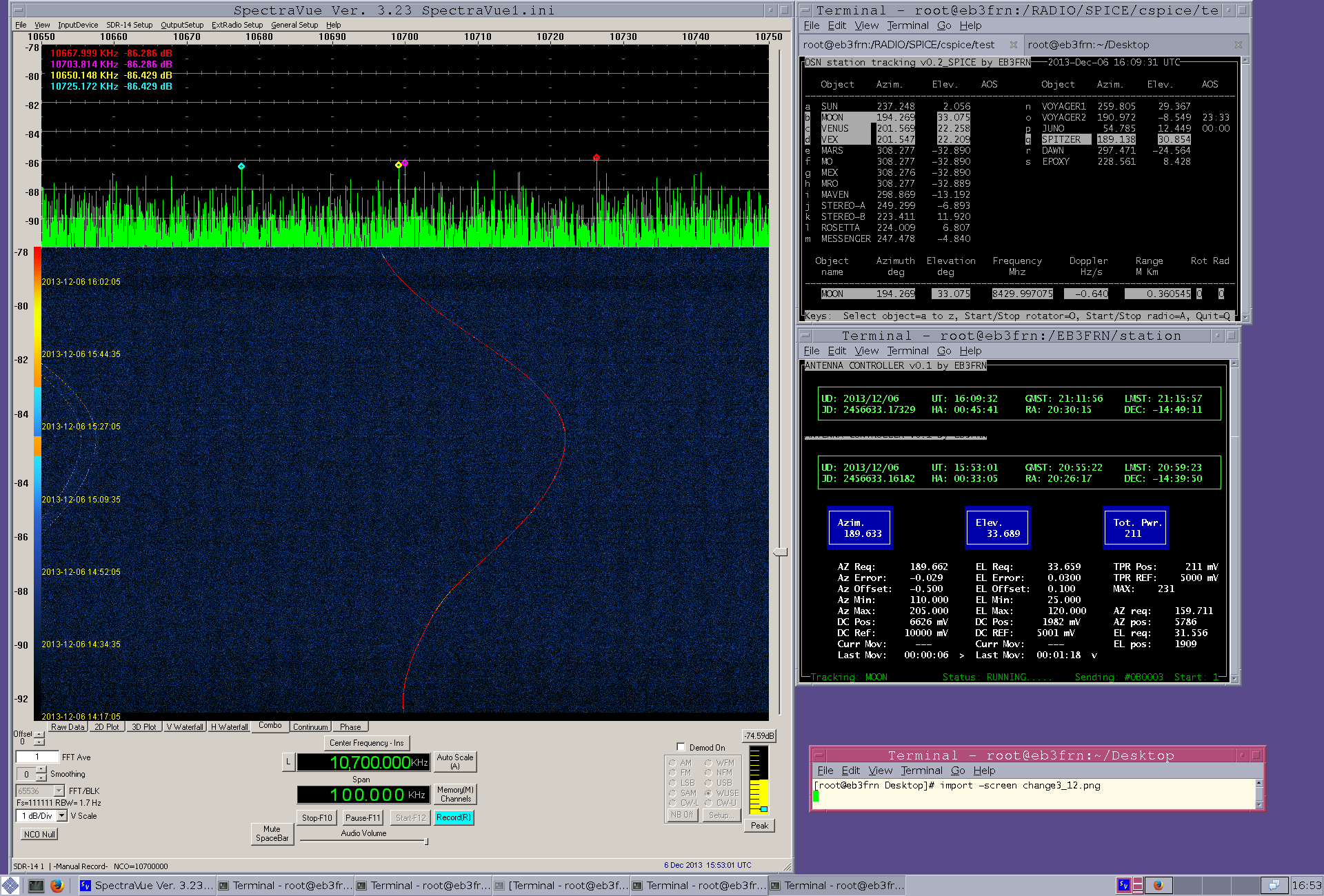
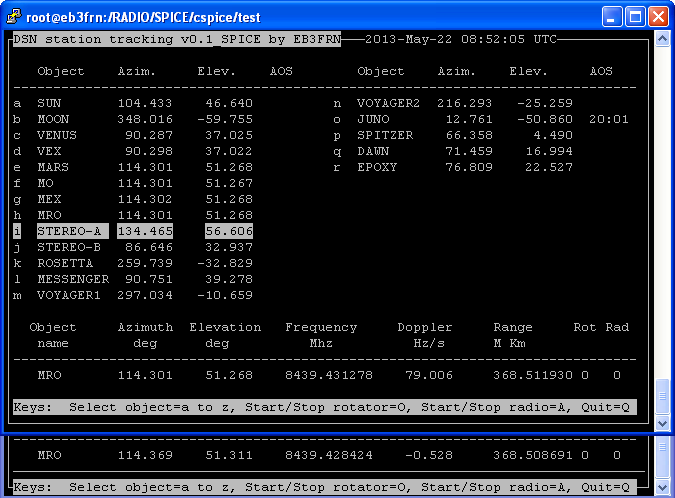
To confirm again the signal I stoped the doppler compensation:
ISEE-3 / ICE no signal without the doppler compensation
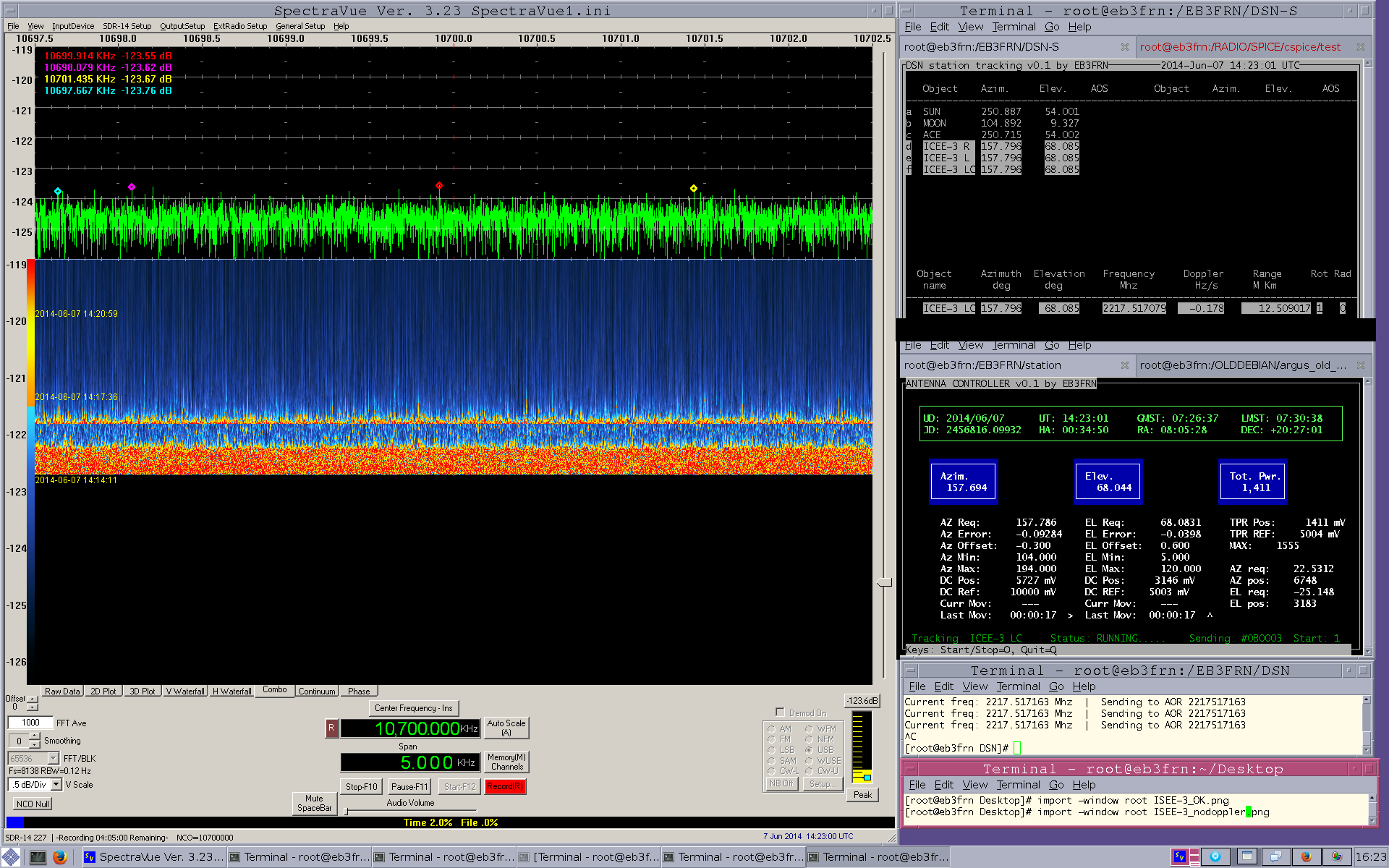
Finally I started to compensate the doppler again and the signal is acquired again:
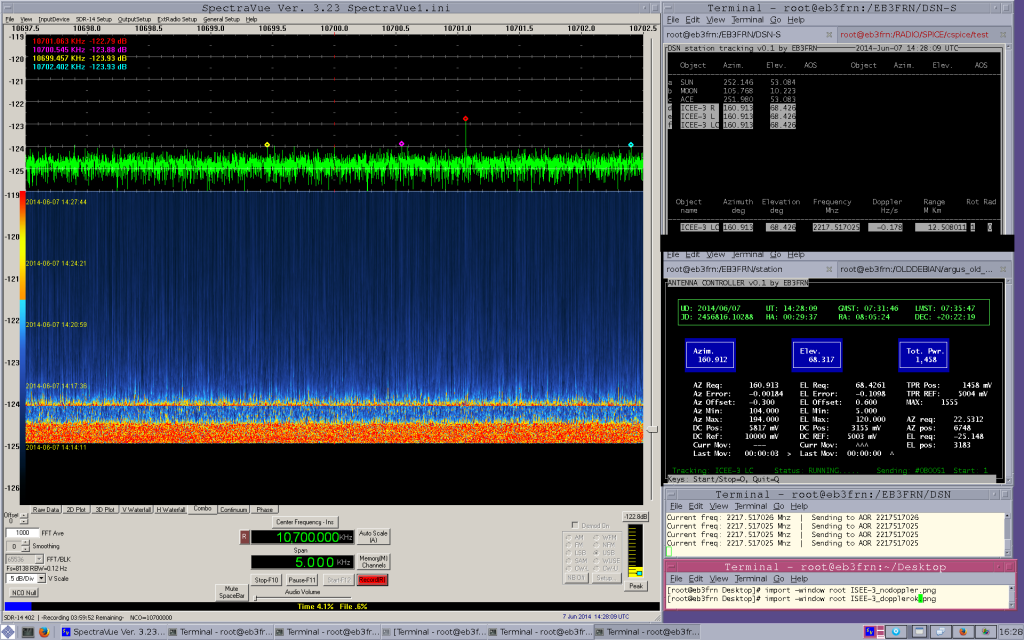
ISEE-3 / ICE with doppler corrected
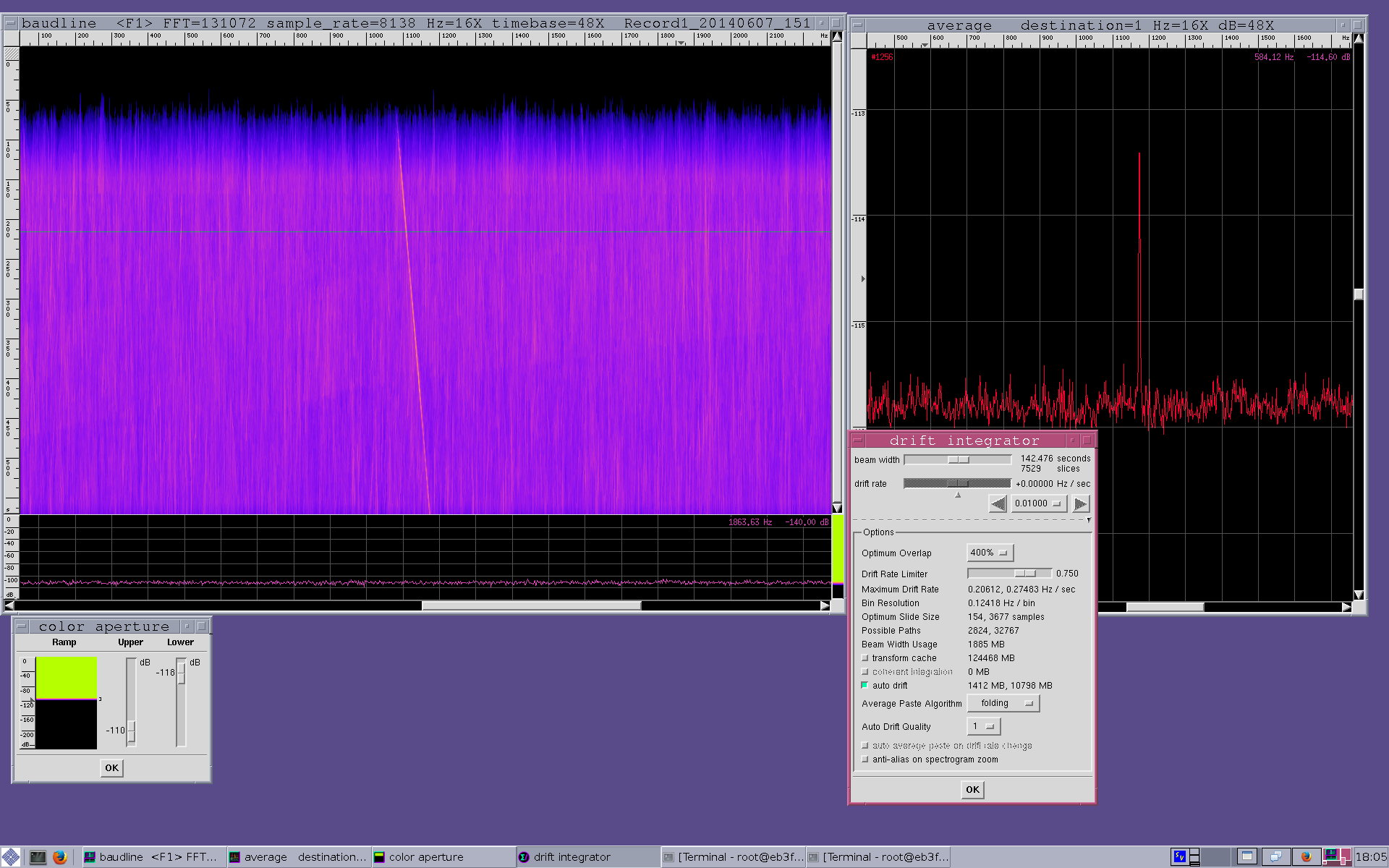
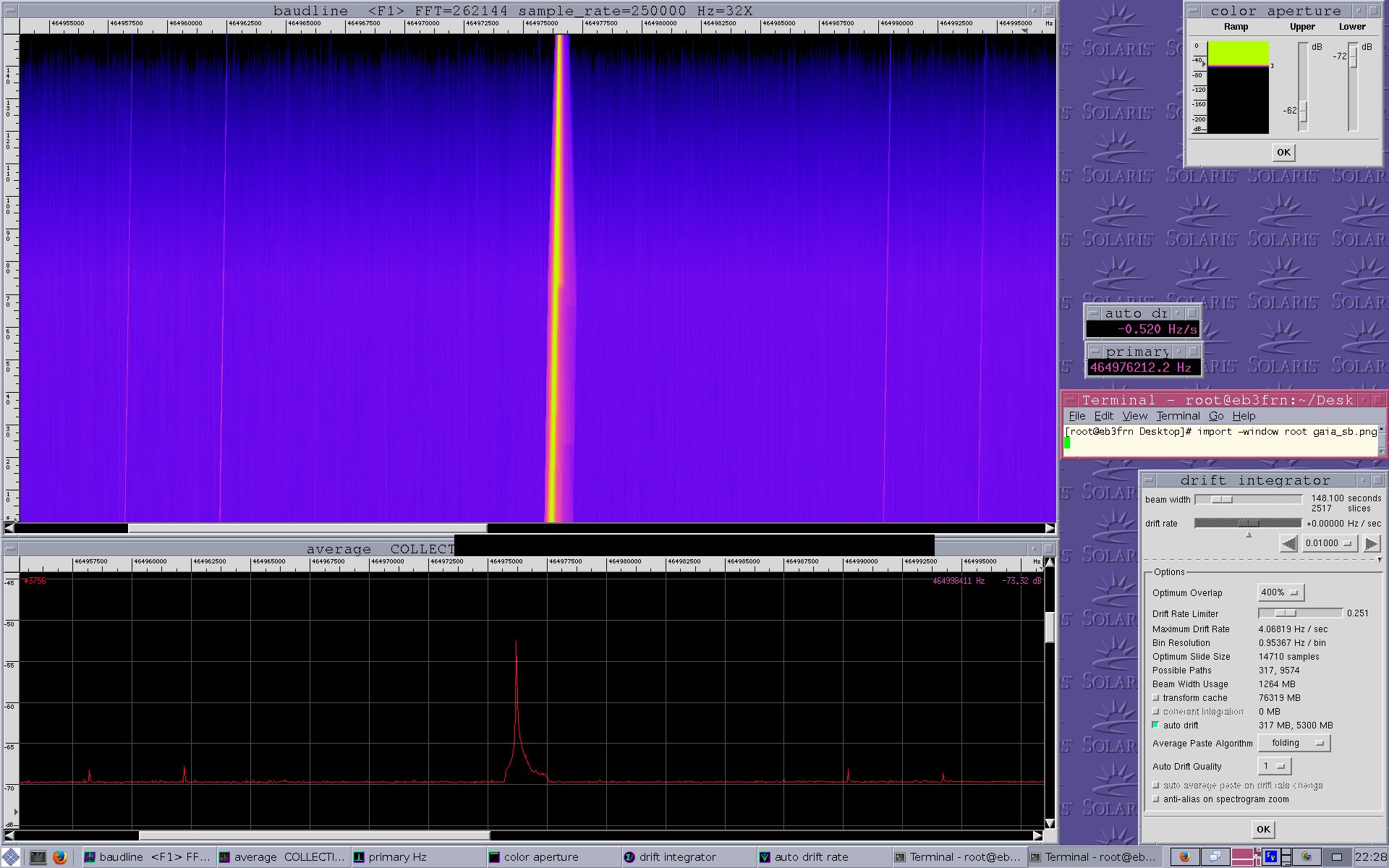
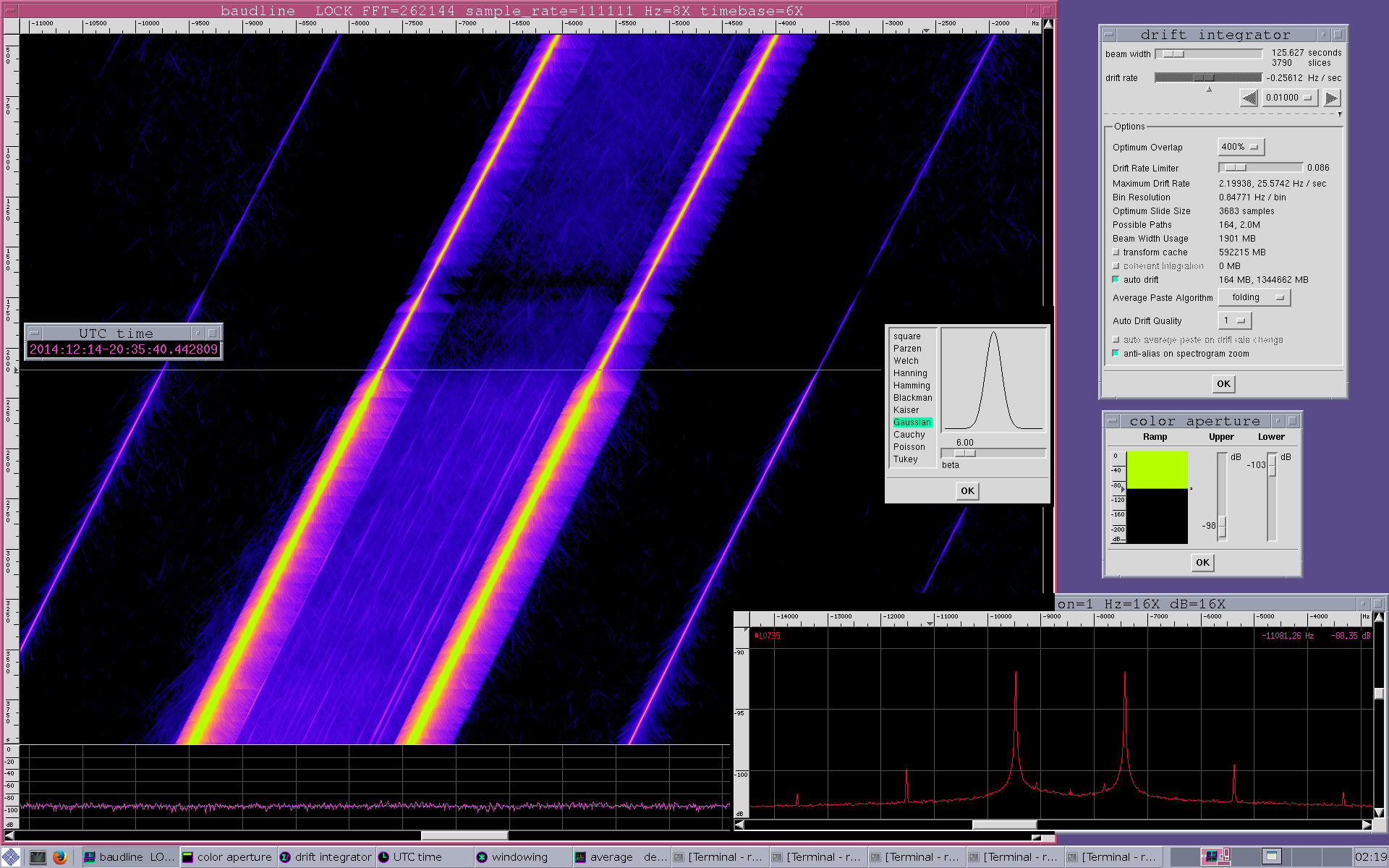
To finally confirm at 100% a offline signal process without doppler compensation to see doppler signature. I used the amazing baudline autodrift option, it is a great feature to see signals with doppler:
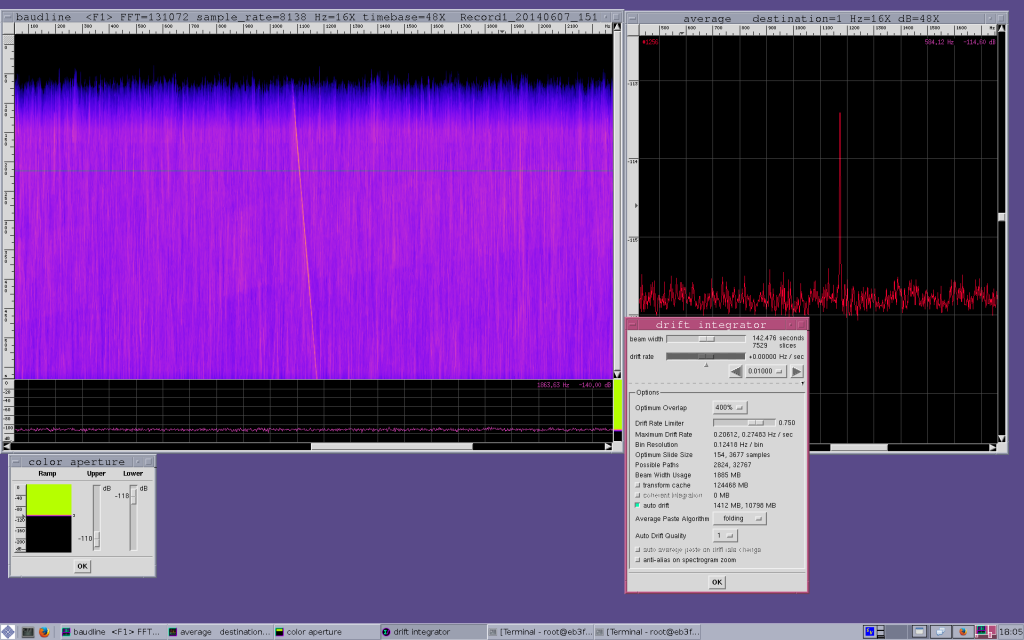
ISEE-3 / ICE baudline autodrift
Here the IQ recording from Spectravue without the doppler compensation used in the baudline analysis. The sample rate is 8138 samples/sec:
www.eb3frn.net/files/Record1_20140607_151047_nodoppler.wav
73!